

Smart Medical solutions
Agile Robots’ self-developed general medical force-controlled robot provides force / torque feedback through detection and adaptation to the surroundings and environment by high-precision joint torque sensor and quickly responds to force contact and precision adjustment with 1kHz control frequency.
Main application scenarios:
Orthopaedical surgery, neurosurgery, endoscopic surgery, gastroscopy surgery, puncture, ultrasound & infrared diagnosis, TCM massage and rehabilitation therapy.
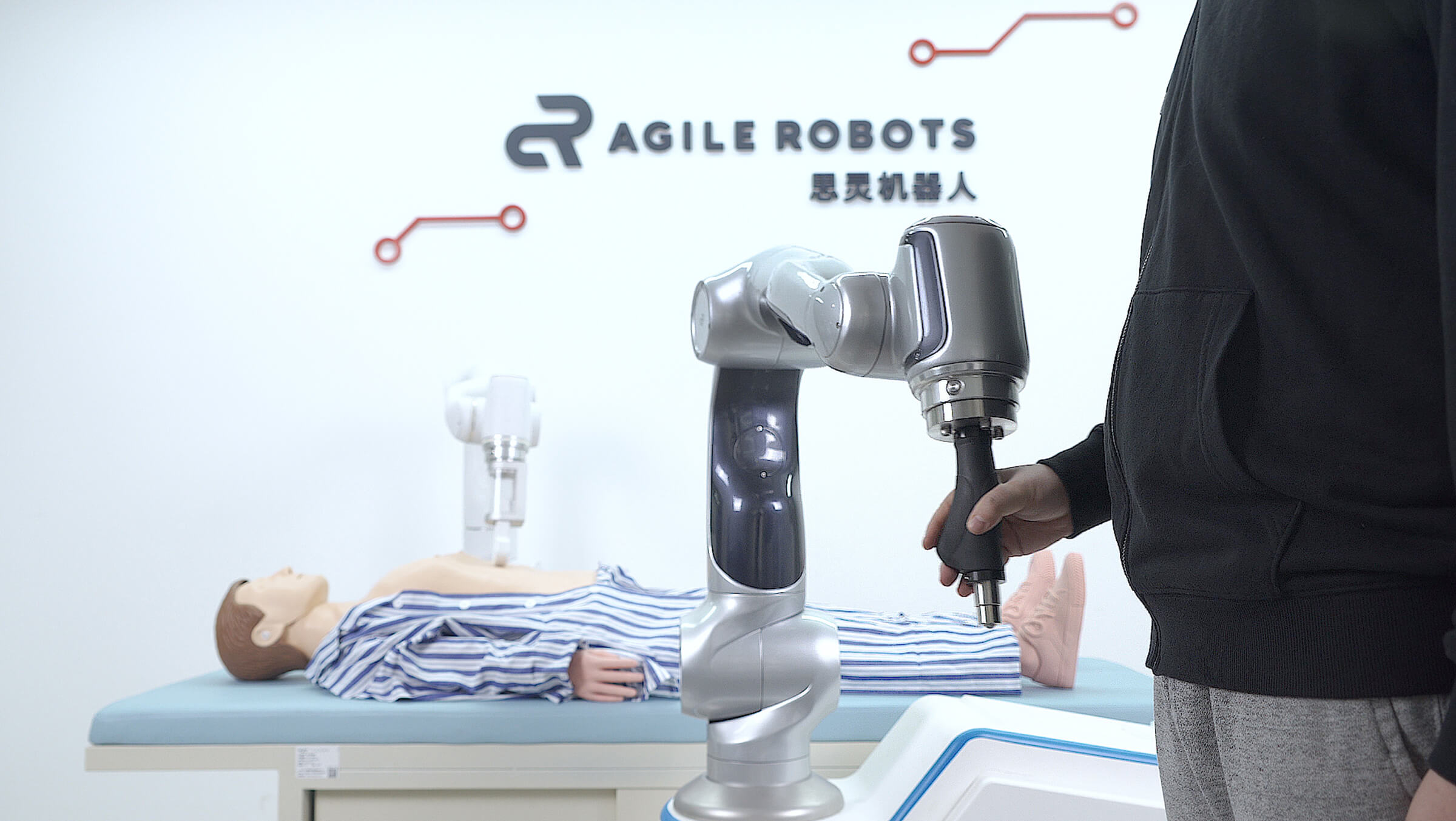
Remote teleoperation surgical robot
This application is a simulation demonstration of the application of the teleoperation system of the surgical robot to the remote ultrasonic diagnosis. When the operator drags the master arm, the slave arm at the far end will reproduce the operator's action. At the same time, the operator can feel the external force on the slave arm in real time and realize the surreal interaction between the operator and the remote scene. Diana teleoperation system has built a real and reliable remote operation interaction through high-precision motion tracking and real-time dynamic force feedback, which can be widely used in the fields of telemedicine, troubleshooting and rescue, and space mission simulation. Meanwhile, Diana's flexible control and virtual wall functions ensure the stability and safety of the operation process.

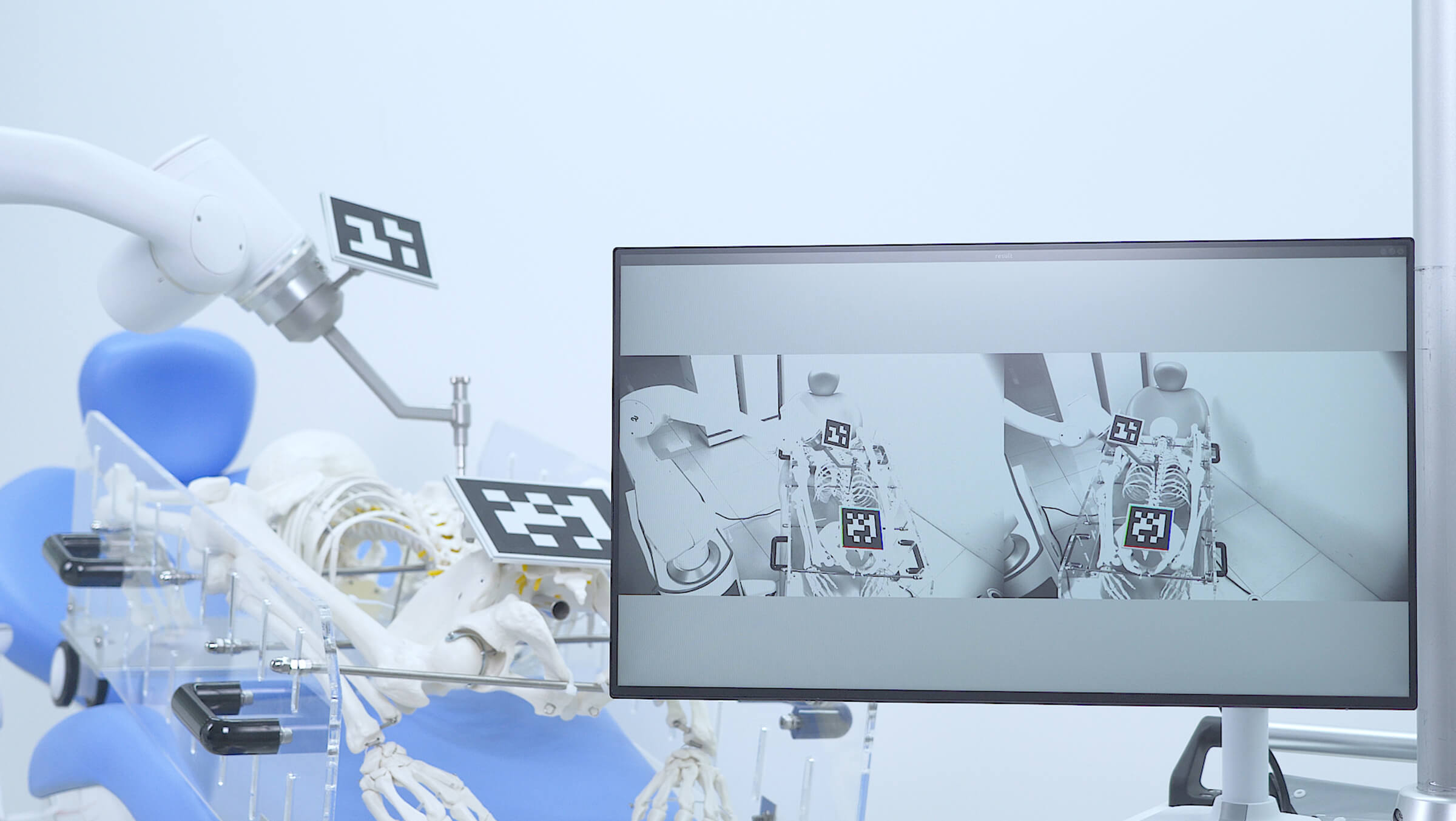
Orthopaedical surgery robot
This application is a simulation demonstration of orthopaedical surgery robot assisted spinal surgery. The system recognizes the dynamic position and posture of the target through binocular 3D vision technology and plan the nail insertion point and the nail path. The high-frequency servo control robot arm accurately follows the target movement. With the guidance device equipped at the endpoint of the robot, it provides a precise and stable guide needle placement path for doctors.
- Formed in-depth cooperation with Chinese top orthopaedical surgery robot company and has applied for NMPA certification.
- Carried out scientific research cooperation with Chinese authoritative orthopaedical hospitals and has made substantial experimental progress.
- Carried out interventional surgery with Chinese leading AAA general hospital.
- Carried out in-depth cooperation with Chinese leading ultrasonic robot company.
- Conducted in-depth cooperation with Chinese leading endoscopic surgery robotic company.
- Launched in-depth cooperation with a university specialized in Chinese Medicine to jointly develop acupuncture point navigation and positioning system.
- Launched in-depth cooperation with an AAA hospital in Beijing to carry out research on massage and rehabilitation robots.








