

两倍300.jpg)
Highly rigid,impact resistant design
-
Flexible impedance control mode: each dimensional stiffness and damping can be set to different value respectively
-
API interface developed for medical scenarios
-
Automatic load recognition and compensation
-
Alcohol-resistant surface coating
-
Matte design, no interference to optical positioning system
-
Fulfills IEC60601-1 and IEC60601-1-2 standards
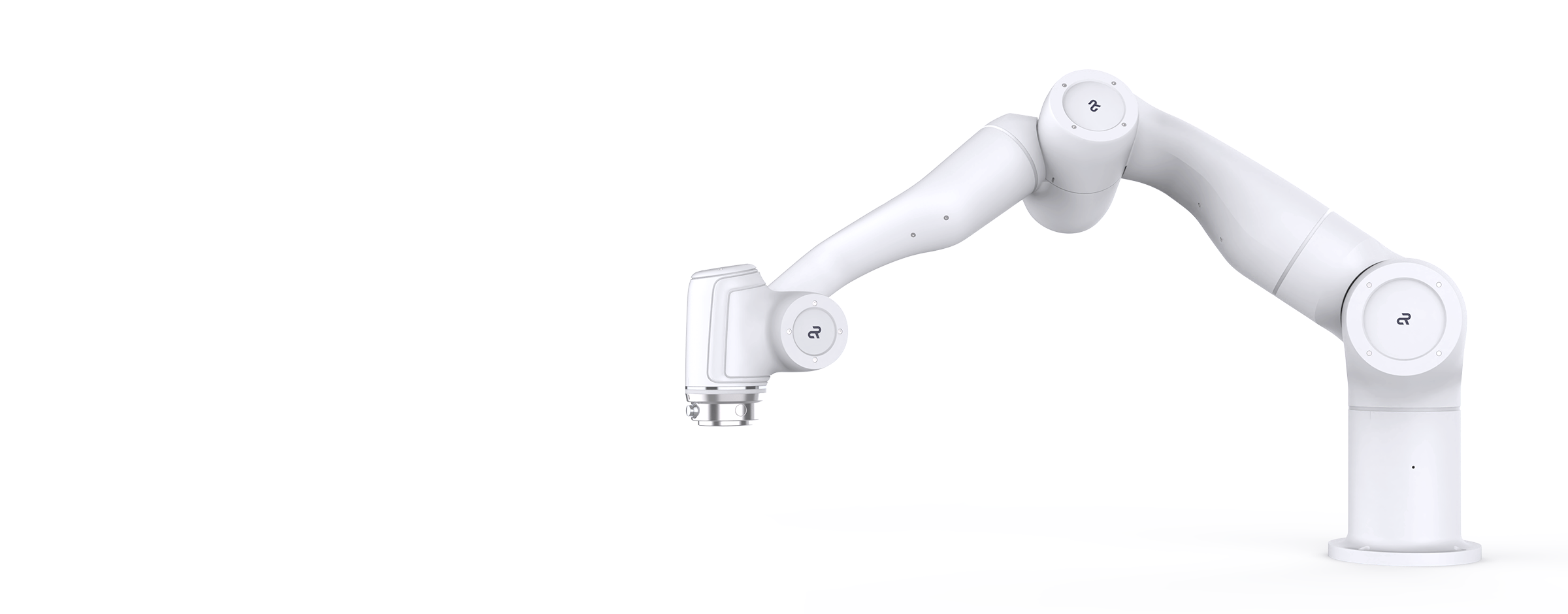
General intelligent ability controlled medical robot
Diana 7 Med is a universal medical robot independently developed by Agile Robots, with high-precision torque sensors built into the joints and highly sensitive force sensing and collision detection capabilities. With 7 degrees of freedom design, it has flexible working space and control mode. The main application scenarios include: orthopaedical, neurosurgery, dentistry and other hard tissue robot-assisted surgery, in addition to ultrasound-related diagnosis and treatment, rehabilitation physiotherapy etc.

Robot
Payload
7 kg
Weight
30 kg
Reachability
916 mm
Base diameter
φ 190 mm
Degree of freedom
7
TCP Typical line speed
1m/s
Pose repeatability
± 0.03 mm
Programming method
Graphical programming environment, script programming, API
Joint 1 range of motion
-179°~179°
Joint 1 maximum speed
90°/s
Joint 2 range of motion
-90°~90°
Joint 2 maximum speed
90°/s
Joint 3 range of motion
-179°~179°
Joint 3 maximum speed
90°/s
Joint 4 range of motion
0°~175°
Joint 4 maximum speed
90°/s
Joint 5 range of motion
-179°~179°
Joint 5 maximum speed
170°/s
Joint 6 range of motion
-179°~179°
Joint 6 maximum speed
170°/s
Joint 7 range of motion
-179°~179°
Joint 7 maximum speed
170°/s
Force control accuracy
0.5 N
Control Box
Cable between robot and Control Box
5.0 m
Powered by
AC 110~240V,50/60Hz
Dimensions (W x D x H)
431mm x 365mm x 174mm
Weight
15kg
Tool I/O ports
4 digital in / 4 digital out
I/O power supply
24V/3A








